Parallax BASIC Stamp II
 The BASIC
Stamp II from Parallax Inc was a pretty logical follow-on to the original
BASIC Stamp. However, by choosing to use multi-chip-module (MCM) technology,
Parallax was able to create a complete computer in something the size of a 24
pin DIP integrated circuit package.
The BASIC
Stamp II from Parallax Inc was a pretty logical follow-on to the original
BASIC Stamp. However, by choosing to use multi-chip-module (MCM) technology,
Parallax was able to create a complete computer in something the size of a 24
pin DIP integrated circuit package.
 Of course you
couldn't use it "out of the box" this way, you needed to either
design a small board around it (fairly easy to do) or plug it into a
prototyping board that Parallax calls the "BS-2 Stamp Carrier
Board." That board, with the stamp installed is shown at the right.
Of course you
couldn't use it "out of the box" this way, you needed to either
design a small board around it (fairly easy to do) or plug it into a
prototyping board that Parallax calls the "BS-2 Stamp Carrier
Board." That board, with the stamp installed is shown at the right.
As you can see, this gives you a DE-9 port for programming (serially this time rather than the BS-1's pseudo serial), the 9V transistor battery connector, some prototyping area (generally worthless), a reset switch, and of course pins that are connected to the BS-2's 16 I/O lines.
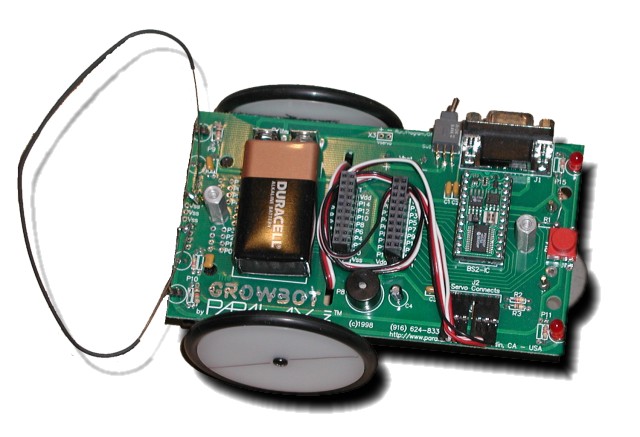
The real trick is to design a board around the BS2 chip and then make that into your robot. The image below is Parallax's "GrowBot." You can just make out the BS2 IC stuck into the board on the right hand side. (there is a larger image here which shows this in more detail)
{kind=link}
 This simple robot uses two servos for motors, a ping pong ball for a
balance wheel, and the PC board has pads and components for several sensors
and a few LEDs. The funky loop on the left is not a metal detector, it is a
bump sensor that activates a pin when the metal is pressed upon by a
collision.
This simple robot uses two servos for motors, a ping pong ball for a
balance wheel, and the PC board has pads and components for several sensors
and a few LEDs. The funky loop on the left is not a metal detector, it is a
bump sensor that activates a pin when the metal is pressed upon by a
collision.
The BASIC Stamp II is also quite a bit faster than the Stamp I although exactly how much faster isn't clear. One experiment would be to benchmark the two with a similar null loop, then try it with something computationally intensive going on in the middle. Part of the problem is that the loop should not do any serial I/O as that forces the chip to serialize a series of bits out of the processor and that can slow it down. (forced delay loops to insure accurate timing do this.)
Controller Features
Processor:
The BASIC Stamp II is built around a PIC microprocessor from MicroChip. The PIC is pre-programmed with a BASIC Interpreter that reads bit encoded tokens out of a serial EEPROM.
Development Environment:
The program is compiled on a PC and then downloaded using a serial cable. port!).
I/O Capabilities:
The BS2 has 16 I/O lines. These can be used as digital inputs and outputs, and with a simple capacitor circuit as pseudo analog out or analog in lines. Any I/O line can be used for serial data as well.
Back to Controllers Back to Robotics