![]()
| By: Chuck McManis |
January 23rd, 2002 |
Several "features" have been added to this toy to make it into a robot:
- The wheels were instrumented to turn them into encoders.
- An electronic motor controller was added internally (not visible)
- A 5V power supply that converts battery power to 5V DC was added.
- An Infra-red obstacle detector is on the front.
- An Ultrasonic distance finder mounted on a servo.
The biggest challenge was slowing it down! As an R/C car it was designed to travel about 15 MPH but that is too fast for the on board computer to navigate. Thus much of the software space was dedicated to monitoring the speed and reducing power as it went too fast.
In the late 90's, getting enough compute power to run a lightweight robot was an issue. Today however single chips running high level languages (BASIC Stamp, OOPIC, etc) are easy to come by.
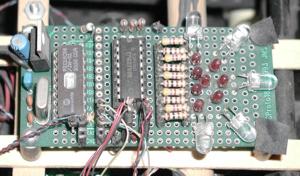
The Cougar IR Detector
The IR detector is a completely custom circuit built using a PIC micro-controller on a prototype board. It sends out modulated IR to each of the IR LEDs (clear) and monitors the three receivers for the reflection. The red LEDs in the center indicate when a reflection is detected.
Cougar Ultrasonic Distance Finder
The Ultrasonic element is recycled from an old Polaroid camera's auto focus unit. The micro-processor times how long it takes an echo to return to the detector. Because the speed of sound is approximately 1000' per second, the number of inches between the robot and the source of the reflection can be computed.
This sensor is accurate to about 1/3 of an inch!
Cougar MicroController (MiniBoard)
The micro-controller used on the Cougar is called a "Miniboard" and it was designed by Dr. Fred Martin of M.I.T. Several people on the Internet got together and built these from parts. The schematics, software, and printed circuit board layouts are all available for free. However, the cost to assemble one in 1995 was about $90.
Other Information
The Cougar took approximately 11 months to build in my spare time. It cost approximately $450 including the price of the original toy. It has been featured in a magazine article and won a prize for creativity at a robotics competition.
| Back to the PROJECTS page | Back to the HOME page |