Introduction
The Dino Track is a simple "one channel" Radio Controlled vehicle that was offered
for sale by Radio Shack one Christmas season. After the season (way after) I
bought one stores remaining stock for $4 each ($20 for five of them). The idea
was to convert them into "prey" robots for a predator/prey
experiment in artificial life.
is a simple "one channel" Radio Controlled vehicle that was offered
for sale by Radio Shack one Christmas season. After the season (way after) I
bought one stores remaining stock for $4 each ($20 for five of them). The idea
was to convert them into "prey" robots for a predator/prey
experiment in artificial life.
The Dino's however have two problems, one is that they are not very sturdy and the second is that the treads on these toys slip on the wheels rather than move when the weight is too great. This pretty much made them a non-starter until another member of the San Francisco robotics group showed how he had fixed the latter problem by gluing tread "grippers" in the wheels.
The treads do have little "nubs" that hang down and go into a groove on the wheel which helps, but doesn't prevent, the tracks from coming off. By gluing small blocks of plastic, evenly spaced in the drive wheel's groove, the drive wheel is able to grab the nubs and force the track along.
Lego Encoders
I used a Lego wheel attached
to the top wheel of the DinoTrack's drive system to create an
encoder.
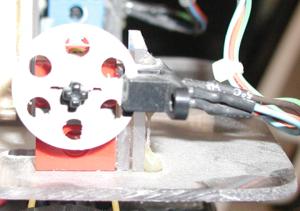
When the holes in the wheel pass the detector a pulse is generated. This is cleaned up by a schmidt-trigger buffer and fed into the input capture pins of a 68HC11 MCU.
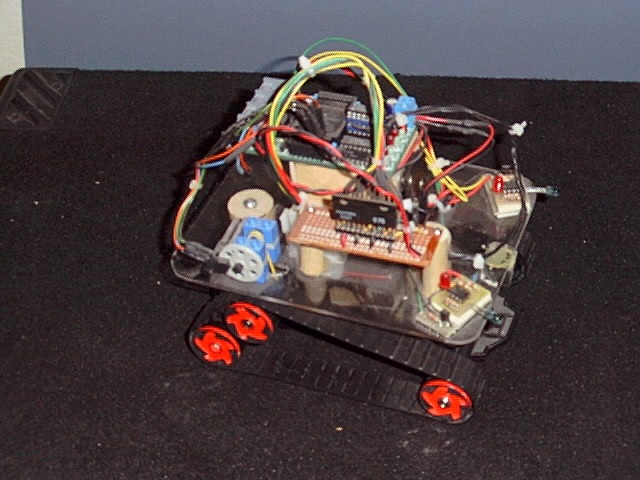 The robot I eventually built is shown on the
left. (Click the image for a bigger picture) It used a Miniboard
for control, but the motors were overheating the L293D so I used the L298 on a
daughter card to up the current capacity of the H-bridge.
The robot I eventually built is shown on the
left. (Click the image for a bigger picture) It used a Miniboard
for control, but the motors were overheating the L293D so I used the L298 on a
daughter card to up the current capacity of the H-bridge.
One of the more interesting aspects of doing this project was that I reverse engineered the schematic for the receiver. There is copy here in PDF format. From this I learned that the receiver was simply an oscillator acting as a tone detector driving an H-bridge. I later took one of the Dino's receiver boards and modified it to provide a remote pushbutton capability. This was accomplished by wiring up half the H-bridge such that when the button was pressed, the "output" saw 5V and when the button wasn't pressed on the transmitter the output saw "ground." This could be fed right into an input pin on the Miniboard.